Neurotechnologies to Help the Body Move, Heal and Feel Again
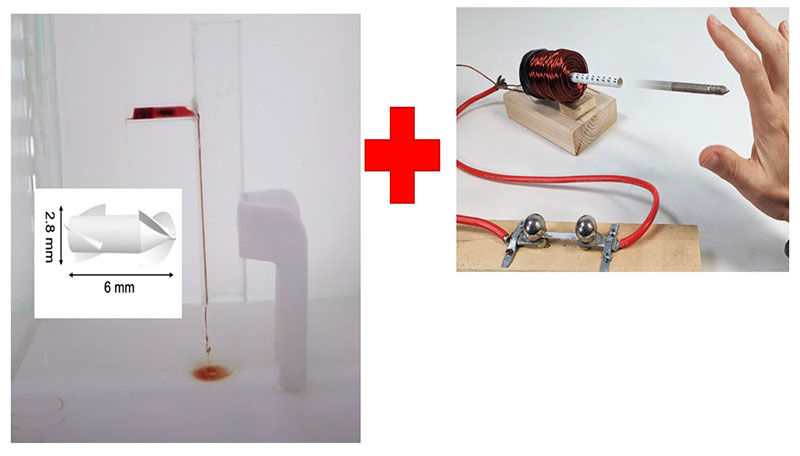
Background: My lab makes magnetic robots (https://youtu.be/bWLrZMvE4oY) to swim through blood vessels and treat diseases inside the body. Unfortunately, our magnetic manipulator has power limits. We plan to mount an electromagnet on a robot arm and route a capacitor bank to put a large charge through the coil to push out robot through obstructions (a coil gun).
Research Plan: We will embed RPs with a team of graduate student mentors to develop and modify our current micro robots designed for removing pulmonary embolism and will experiment with design modifications so the micro robots can be propelled by a capacitor-driven coil. RPs will be involved in all aspects of the research, from design, experimental execution to data collection and analysis, lab presentations and preparation of technical reports.